Pada tanggal 09 Oktober, pada saat setelah pulang sekolah (selesai UTS Ganjil), kami sekelas mengerjakan tugas praktek system computer minimal atau membuat robot. Kita mengerjakan tugas ini selama setengah hari (dari siang sampai sore). Kita mengerjakan ini dengan cara berbagi bagi tugas, ada yang bagian fotografer, merangkai bagian robot, membuat papan jalan lintasnya robot, dan menghias pada bagian-bagian papan lintasnya robot.
Pengertian Robot Line Follower :
Robot Line Follower adalah suatu robot yang dirancang / dibuat menyerupai mobil, dan cara kerjanya ialah robot tersebut akan mengikuti garis hitam/putih secara otomatis dimana pengendalinya berupa sensor-sensor yang selanjutnya akan di eksekusi oleh komparator berupa ic atau transistor-transistor dilanjutkan ke motor yang membuat robot bisa bekerja sebagai mana mestinya.
Robot Line Follower ada dua jenis yaitu robot line follower analog dan robot line follower digital, perbedaan yang terlihat jelas antara kedua jenis robot ini yaitu pada robot line follower (LF) analog tidak menggunakan program sedangkan robot LF digital dijalankan menggunakan program.
Disini saya akan menjelaskan secara singkat mengenai robot line follower analog. robot ini memiliki 4 komponen yaitu, sensor, komparator, power supply, serta driver motor.
Cara kerja robot line follower :
Sensor mengirimkan data jika photo dioda dalam sensor terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1. Selanjutnya pada komparator akan dibandingkan tegangan input (tegangan dari sensor) dengan tegangan referensi (tegangan dari variabel transistor). Apabila tegangan input lebih besar dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan maks power supply (high/1), apabila tegangan input lebih kecil dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan min power supply (low/0). Setelah itu, data akan dikirmkan ke driver motor yang berfungsi untuk menggerakkan motor kanan dan motor kiri. Untuk mengisi program pada mikrokontroller yaitu dengan cara menghubungkan mikrokontroller pada komputer, tentunya ada alat bantu untuk menghubungkannya dan pastinya ada software untuk membuat program dan memasukkan program tersebut. Dapat dikatakan bahwa robot yang menggunakan Mikrokontroller lebih mudah dikendalikan dengan kecepatan yang cepat sekalipun.
Komponen yang dibutuhkan untuk membuat Robot Line Follower:
- 1buah mainboard
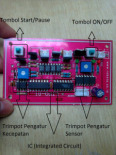
Mainboard ini terdiri dari beberapa komponen yang sudah digabungkan seperti trimpot pengatur kecepatan dan trimpot pengatur sensor, ada juga IC yang berfungsi sebagai jantung pada suatu rangkaian. Karena IC-lah yang mengatur tegangan input dan out put serta mengatur kerja dari setiap blok rangkaian dengan membagi tugas masing-masing blok rangkaian tertentu.
- 2buah sensor pembaca garis (LED dan Photodioda)
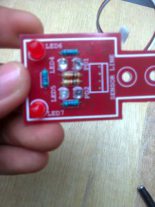
LED adalah singkatan dari Light Emiting Dioda, yakni merupakan komponen lain dari dioda yang dapat mengeluarkan cahaya.
Sedangkan Photodioda adalah jenis dioda yang berfungsi mendeteksi cahaya. Komponen elektronika ini akan mengubah cahaya menjadi arus listrik, yang kemudian arus listrik ini akan disalurkan menuju IC yang selanjutnya akan dilanjutkan ke motor – motor DC.
- 2buah motor DC berkecepatan tinggi

Motor DC ini berfungsi untuk menggerakan roda agar bisa berjalan.
- 2buah ban khusus kompetisi (Anti Selip)

Nah, ban yang digunakan pada robot ini yaitu ban anti selip, ban ini sangat cocok digunakan pada jalur yang memiliki tikungan yang tajam.
- Trimpot pengatur kecepatan

Trimpot ini berfungsi untuk mengatur kecepatan robot. Kecepatan ini harus diatur dengan kepekaan sensor, jika terlalu cepat kemungkinan akan keluar jalur.
- Trimpot pengatur sensor
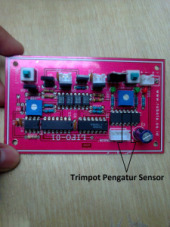
dan Trimpot yang ini berfungsi untuk mengatur kepekaan sensor, biasanya kepekaan sensor didalam ruangan dengan diluar ruangan agak berbeda, tergantung cahaya nya.
- Chasis

Chasis ini berguna sebagai tempat penyimpanan komponen – komponen yang akan digunakan nantinya. Chasis ini juga sangat penting karena dapat mempengaruhi kinerja robot yang akan dibuat.
Tahapan-Tahapan Perakitan
- Tahapan pertama yaitu memasang Motor DC pada roda, lalu memasang kabel penghubung, kemudian langsung dipasang pada chasis.

2.Tahapan kedua yaitu memasang sensor pembaca garis pada chasis yang sebelumnya telah dipasang di PCB.

- Tahapan ketiga yaitu memasang mainboard, pada robot yang saya rakit, mainboard nya saya pasang diatas motor DC. Kira-kira gambarnya seperti ini


4.Tahapan keempat yaitu memasang kabel untuk menghubungkan daya dari baterai


5.Dan tahapan yang terakhir yaitu memasang baterai, Baterai yang digunakan untuk robot ini yaitu baterai lithium polymer dengan tegangan 6-9 Volt.
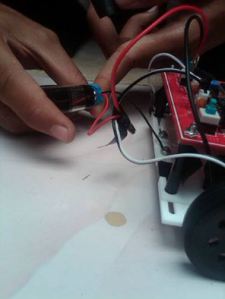

ya, seperti itulah tahapan-tahapan perakitan robot line follower semoga bermanfaat, dan ini beberapan gambar hasil dari perakitan yang belum dirapihkan.
Ini hasil kerja kami 🙂

Cukup Sekian dan Terimakasih 🙂

tugas percobaannya sudah baik semoga kedepannya sering melakukan eksperimen sehingga menambah wawasan yg banyak. sayang fotonya terlalu kecil sehingga tidak begitu jelas
SukaSuka